از طریق منوی جستجو مطلب مورد نظر خود در وبلاگ را به سرعت پیدا کنید


زمان لازم برای مطالعه: 2 دقیقه
اگر کسی به شما توصیه میکند که «محدودیتهای خود را بشناسید»، احتمالاً به شما پیشنهاد میکند کارهایی مانند ورزش را در حد اعتدال انجام دهید. با این حال، برای یک ربات، این شعار بیانگر محدودیتهای یادگیری یا محدودیتهای یک کار خاص در محیط ماشین، برای انجام صحیح و ایمن کارها است.
به عنوان مثال، تصور کنید از یک ربات بخواهید آشپزخانه شما را تمیز کند، در حالی که فیزیک محیط اطراف خود را درک نمی کند. چگونه دستگاه می تواند یک طرح چند مرحله ای عملی ایجاد کند تا اطمینان حاصل شود که اتاق بدون لک است؟ مدل های زبان بزرگ (LLM) می توانند آنها را نزدیک کنند، اما اگر مدل فقط آموزش دیده باشد روی متن، احتمالاً از دست میرود روی مشخصات کلیدی در مورد محدودیت های فیزیکی ربات، مانند اینکه تا چه اندازه می تواند به آن برسد یا اینکه آیا موانعی در نزدیکی وجود دارد که باید از آنها اجتناب کرد. فقط به LLM ها پایبند باشید، و احتمالاً لکه های ماکارونی را از روی تخته کف خود تمیز می کنید.
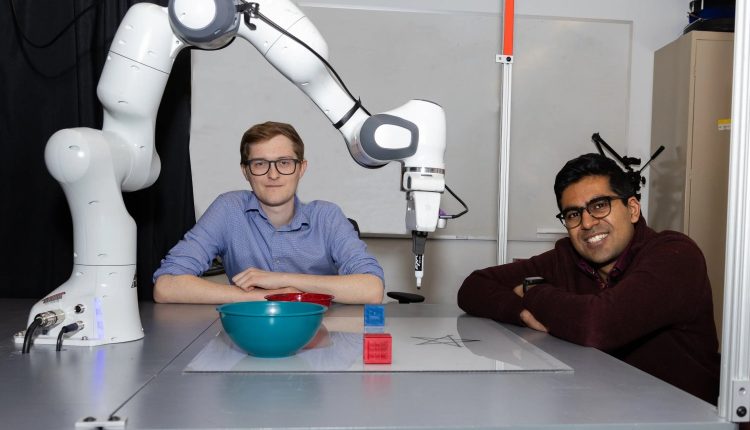
برای راهنمایی روباتها در اجرای این وظایف باز، محققان آزمایشگاه علوم کامپیوتر و هوش مصنوعی MIT (CSAIL) از مدلهای بینایی برای دیدن آنچه در نزدیکی دستگاه است و مدلسازی محدودیتهای آن استفاده کردند. استراتژی این تیم شامل یک LLM است که طرحی را ترسیم می کند که در یک شبیه ساز بررسی می شود تا مطمئن شود که ایمن و واقعی است. اگر آن توالی اقدامات غیرممکن باشد، مدل زبان طرح جدیدی ایجاد می کند تا زمانی که به طرحی برسد که ربات بتواند آن را اجرا کند.
این روش آزمون و خطا، که محققان آن را “برنامه ریزی برای ربات ها از طریق کد برای رضایت مستمر محدودیت” (PRoC3S) می نامند، برنامه های افق طولانی را آزمایش می کند تا اطمینان حاصل شود که آنها همه محدودیت ها را برآورده می کنند و یک ربات را قادر می سازد تا وظایف متنوعی مانند نوشتن را انجام دهد. حروف جداگانه، ترسیم یک ستاره، و مرتب سازی و قرار دادن بلوک ها در موقعیت های مختلف. در آینده، PROC3S میتواند به رباتها کمک کند تا کارهای پیچیدهتری را در محیطهای پویا مانند خانهها انجام دهند، جایی که ممکن است از آنها خواسته شود تا یک کار کلی متشکل از چندین مرحله را انجام دهند (مانند «برای من صبحانه درست کن»).
LLM ها و سیستم های رباتیک کلاسیک مانند برنامه ریزان وظیفه و حرکت نمی توانند این نوع وظایف را اجرا کنند. روی Nishanth Kumar SM ’24، دانشجوی دکترا، نویسنده ارشد مقاله جدید در مورد PROC3S، میگوید که خود آنها، اما در کنار هم، هم افزایی آنها، حل مسئله را ممکن میسازد. ما در حال ایجاد یک شبیه سازی هستیم روی-پرواز آنچه در اطراف ربات است و آزمایش بسیاری از برنامه های عملی ممکن. مدلهای بینایی به ما کمک میکنند تا دنیای دیجیتالی بسیار واقعگرایانهای ایجاد کنیم که ربات را قادر میسازد تا در مورد اقدامات عملی برای هر مرحله از یک طرح افق بلند استدلال کند.
کار این تیم در ماه گذشته در مقاله ای که در کنفرانس نشان داده شد ارائه شد روی آموزش ربات (CoRL) در مونیخ، آلمان.
منبع: https://news.mit.edu/1403/teaching-robot-its-limits-complete-open-ended-tasks-safely-1212
برای نگارش بخشهایی از این متن ممکن است از ترجمه ماشینی یا هوش مصنوعی GPT استفاده شده باشد
لطفا در صورت وجود مشکل در متن یا مفهوم نبودن توضیحات، از طریق دکمه گزارش نوشتار یا درج نظر روی این مطلب ما را از جزییات مشکل مشاهده شده مطلع کنید تا به آن رسیدگی کنیم
لطفا در صورت وجود مشکل در متن یا مفهوم نبودن توضیحات، از طریق دکمه گزارش نوشتار یا درج نظر روی این مطلب ما را از جزییات مشکل مشاهده شده مطلع کنید تا به آن رسیدگی کنیم
زمان انتشار: 1403-12-13 22:13:09
