از پاک کردن مواد ریخته شده تا سرو غذا، به روباتها آموزش داده میشود که کارهای پیچیدهتر خانگی را انجام دهند. بسیاری از این کارآموزان ربات خانگی از طریق تقلید یاد می گیرند. آنها طوری برنامه ریزی شده اند که حرکاتی را که انسان به طور فیزیکی آنها را هدایت می کند، کپی کنند.
به نظر می رسد که روبات ها تقلیدهای عالی هستند. اما مگر اینکه مهندسان آنها را طوری برنامهریزی کنند که با هر ضربه و ضربه احتمالی سازگار شوند، رباتها لزوماً نمیدانند چگونه با این موقعیتها کنار بیایند، مگر اینکه کار خود را از بالا شروع کنند.
اکنون مهندسان MIT قصد دارند تا زمانی که روباتها با موقعیتهایی مواجه میشوند که آنها را از مسیر آموزشدیدهشان دور میکند، کمی عقل سلیم داشته باشند. آنها روشی را توسعه دادهاند که دادههای حرکت ربات را با “دانش عقل سلیم” مدلهای زبان بزرگ یا LLM مرتبط میکند.
رویکرد آنها یک ربات را قادر می سازد تا به طور منطقی بسیاری از وظایف خانه را به وظایف فرعی تجزیه و تحلیل کند و به طور فیزیکی با اختلالات درون یک کار فرعی سازگار شود تا ربات بتواند حرکت کند. روی بدون نیاز به بازگشت به عقب و شروع یک کار از ابتدا – و بدون نیاز به مهندسان برای برنامهریزی صریح برای هر خرابی احتمالی در طول مسیر.
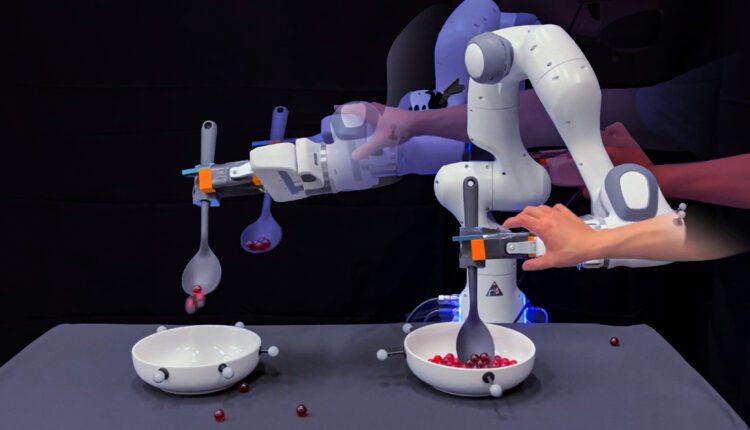
تصویر توسط محققین.
«یادگیری تقلیدی یک رویکرد اصلی است که رباتهای خانگی را قادر میسازد. اما اگر یک ربات کورکورانه از مسیر حرکت انسان تقلید کند، خطاهای کوچکی میتوانند جمع شوند و در نهایت بقیه مراحل اجرا را از مسیر خارج کنند. با روش ما، یک ربات می تواند خطاهای اجرا را خود تصحیح کند و موفقیت کلی کار را بهبود بخشد.
وانگ و همکارانش رویکرد جدید خود را در مطالعهای که در کنفرانس بینالمللی ارائه خواهند کرد، شرح میدهند روی نمایندگی های یادگیری (ICLR) در ماه مه. نویسندگان مشترک این مطالعه شامل دانشجویان فارغ التحصیل EECS، تسون-هسوان وانگ و جیایوان مائو، مایکل هاگنو، فوق دکترای دپارتمان هوانوردی و فضانوردی MIT (AeroAstro) و جولی شاه، پروفسور HN Slater در هوانوردی و فضانوردی در MIT هستند.
وظیفه زبان
محققان رویکرد جدید خود را با یک کار ساده نشان میدهند: برداشتن تیلهها از یک کاسه و ریختن آنها در کاسه دیگر. برای انجام این کار، مهندسان معمولاً یک ربات را از طریق حرکات جمع کردن و ریختن – همه در یک مسیر سیال حرکت می دهند. آنها ممکن است چندین بار این کار را انجام دهند تا به ربات تعدادی نمایش انسانی برای تقلید ارائه دهند.
وانگ می گوید: «اما تظاهرات انسانی یک مسیر طولانی و پیوسته است.
تیم متوجه شد، در حالی که یک انسان ممکن است یک کار واحد را در یک حرکت نشان دهد، آن کار بستگی دارد روی دنباله ای از وظایف فرعی، یا مسیرها. به عنوان مثال، ربات باید ابتدا دستش را به داخل کاسه بکشد، و قبل از اینکه به کاسه خالی برود، باید تیله ها را جمع کند و غیره. اگر یک ربات تحت فشار قرار گیرد یا در حین هر یک از این وظایف فرعی مرتکب اشتباه شود، تنها چاره آن توقف و شروع از ابتدا است، مگر اینکه مهندسان به صراحت هر زیرکار را برچسب گذاری کنند و برنامه ریزی کنند یا نمایش های جدیدی را جمع آوری کنند تا ربات بتواند از کار بازیابی کند. گفت: شکست، برای فعال کردن یک ربات برای تصحیح خود در لحظه.
وانگ می گوید: «این سطح از برنامه ریزی بسیار خسته کننده است.
در عوض، او و همکارانش دریافتند که برخی از این کارها می تواند به طور خودکار توسط LLM ها انجام شود. این مدل های یادگیری عمیق process کتابخانه های عظیمی از متن که از آنها برای ایجاد ارتباط بین کلمات، جملات و پاراگراف ها استفاده می کنند. از طریق این ارتباطات، یک LLM میتواند بر اساس جملات جدیدی تولید کند روی آنچه در مورد نوع کلمه ای که احتمالاً بعد از آخرین کلمه یاد گرفته است.
به نوبه خود، محققان دریافتند که علاوه بر جملات و پاراگرافها، میتوان از یک LLM برای تهیه فهرست منطقی از وظایف فرعی که در یک کار معین دخیل هستند، ترغیب کرد. بهعنوان مثال، اگر از LLM سؤال شود که اقدامات مربوط به برداشتن تیلهها از یک کاسه به کاسه دیگر را فهرست کند، ممکن است یک LLM دنبالهای از افعال مانند «رسیدن»، «اسکوپ کردن»، «حمل و نقل» و «ریختن» را تولید کند.
LLM ها راهی دارند که به شما می گویند چگونه هر مرحله از یک کار را به زبان طبیعی انجام دهید. وانگ می گوید: تظاهرات مداوم انسان تجسم آن مراحل در فضای فیزیکی است. و ما می خواستیم این دو را به هم وصل کنیم تا یک ربات به طور خودکار بداند که در چه مرحله ای از یک کار است و بتواند دوباره برنامه ریزی کند و بازیابی کند. روی مال خودش.»
نقشه برداری از سنگ مرمر
برای رویکرد جدید خود، این تیم الگوریتمی برای اتصال خودکار برچسب زبان طبیعی LLM برای یک کار فرعی خاص با موقعیت ربات در فضای فیزیکی یا تصویری که حالت ربات را رمزگذاری میکند، توسعه دادند. نگاشت مختصات فیزیکی ربات، یا تصویری از وضعیت ربات، به یک برچسب زبان طبیعی به عنوان «زمین» شناخته می شود. الگوریتم جدید این تیم برای یادگیری یک «طبقهبندی کننده» زمینی طراحی شده است، به این معنی که یاد میگیرد به طور خودکار تشخیص دهد که یک ربات در چه زیرکار معنایی قرار دارد – به عنوان مثال، «دسترسی» در مقابل «scoop» – با توجه به مختصات فیزیکی آن یا نمای تصویر.
وانگ توضیح میدهد: «طبقهبندی زمین این گفتگو را بین آنچه ربات در فضای فیزیکی انجام میدهد و آنچه LLM درباره وظایف فرعی میداند، و محدودیتهایی که باید در هر زیرکار به آنها توجه کنید، تسهیل میکند.
این تیم این رویکرد را در آزمایشهایی با بازوی روباتیکی که آموزش داده بودند نشان دادند روی یک کار جمع آوری سنگ مرمر آزمایشگران ربات را با هدایت فیزیکی این ربات آموزش دادند که ابتدا دستش را به داخل یک کاسه بردارد، تیلهها را جمع کند، آنها را روی یک کاسه خالی بریزد و داخل آن ریخت. برای فهرست کردن مراحل مربوط به برداشتن سنگ مرمر از یک کاسه به کاسه دیگر. سپس محققان از الگوریتم جدید خود برای اتصال زیرکارهای تعریف شده LLM با داده های مسیر حرکت ربات استفاده کردند. الگوریتم به طور خودکار یاد گرفت که مختصات فیزیکی ربات را در مسیرها و نمای تصویر مربوطه را به یک کار فرعی مشخص کند.
سپس تیم به ربات اجازه می دهد تا کار جستجو را انجام دهد روی خود، با استفاده از طبقهبندیکنندههای زمینی که به تازگی آموختهاند. همانطور که ربات در مراحل کار حرکت می کرد، آزمایشگران ربات را هل دادند و از مسیرش خارج کردند و تیله هایی را از قاشق آن در نقاط مختلف کوبیدند. به جای توقف و شروع دوباره از ابتدا، یا کورکورانه بدون تیله ادامه دهید روی قاشق خود، ربات قادر به تصحیح خود بود، و هر زیرکار را قبل از حرکت انجام داد روی بعدی. (به عنوان مثال، اطمینان حاصل می کند که تیله ها را قبل از انتقال به کاسه خالی با موفقیت جمع آوری کرده است.)
وانگ میگوید: «در روش ما، وقتی ربات اشتباه میکند، نیازی نیست که از انسانها بخواهیم برنامهریزی کنند یا نمایشهای بیشتری درباره روش بهبودی از شکستها ارائه دهند. این فوق العاده هیجان انگیز است زیرا اکنون تلاش زیادی برای آموزش روبات های خانگی با داده های جمع آوری شده وجود دارد روی سیستم های عملیات از راه دور الگوریتم ما اکنون میتواند دادههای آموزشی را به رفتار رباتی قوی تبدیل کند که میتواند کارهای پیچیده را علیرغم اختلالات خارجی انجام دهد.
برای نگارش بخشهایی از این متن ممکن است از ترجمه ماشینی یا هوش مصنوعی GPT استفاده شده باشد
لطفا در صورت وجود مشکل در متن یا مفهوم نبودن توضیحات، از طریق دکمه گزارش نوشتار یا درج نظر روی این مطلب ما را از جزییات مشکل مشاهده شده مطلع کنید تا به آن رسیدگی کنیم